

Nissan kehittää autoihin AR-virtuaalitekniikkaa, jossa oikea ja virtuaalimaailma sulautuvat toisiinsa. Uuden tekniikan avulla autoilija näkee aiempaa helpommin vaikeasti havaittavia kohteita. Virtuaalitekniikan avulla sadekelin voi muuttaa vaikka aurinkonäkymään. Yritys esittelee ”Invisible-to-Visible” -konseptiautonsa ensi viikolla alkavilla Las Vegasin CES2019-messuilla.
Nissan raottaa Las Vegasin tämänvuotisessa kuluttajaelektroniikan CES-näyttelyssä (International Consumer Electronics Show) visiotaan ajoneuvosta, joka auttaa kuljettajaansa näkemään vaikeasti havaittavia kohteita. Oikeaa ja virtuaalimaailmaa yhdistävän teknologian avulla kuljettaja pääsee kokemaan uudenlaisen tietoverkkoon kytketyn auton edut.
”Nissanin i2V lisää kuljettajan ajovarmuutta ja parantaa ajonautintoa, sillä järjestelmä auttaa kuljettajaa näkemään vaikeasti havaittavia kohteita”, tekninen asiantuntija Tetsudo Ueda Nissan Research Centeristä sanoo.
i2V- järjestelmä seuraa ajoneuvon lähiympäristöä ja ennustaa myös sitä, mitä saattaa olla odotettavissa esimerkiksi rakennuksen toisella puolella tai kulman takana. i2V avustaa autoilijaa yhdistämällä auton ulko- ja sisäpuolilla olevien anturien keräämää tietoa pilvipalveluista saatavaan dataan.
Ajokokemuksesta tulee Nissanin mukaan aiempaa miellyttävämpi interaktiivisen ja ihmisläheisen, auton sisätiloihin ilmestyvän avatar-hahmon ohjauksen avulla. Virtuaalimaailmaa hyödyntävä i2V-järjestelmä avaa uusia mahdollisuuksia myös alan palvelutuottajille.
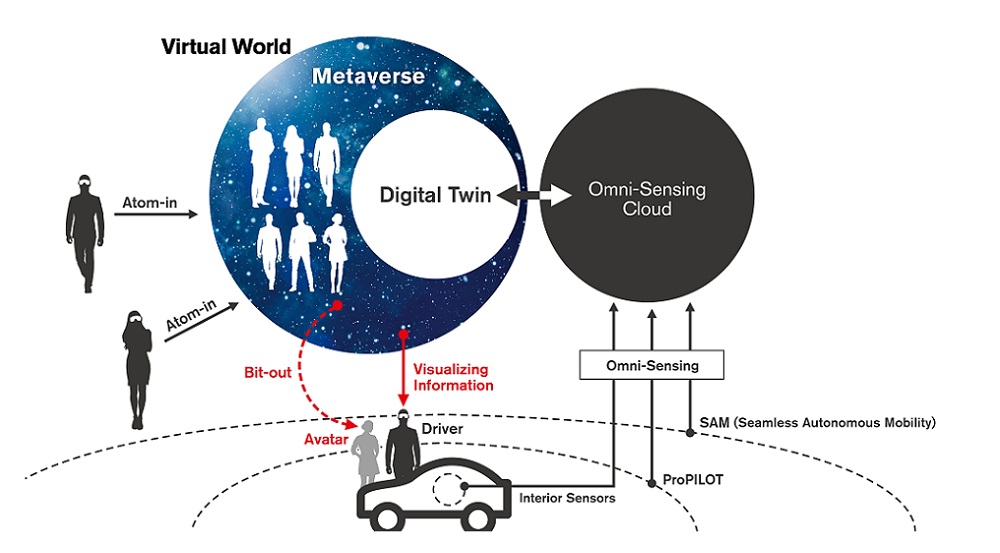
Nissan i2V voi tehdä autoilusta miellyttävämmän myös itseohjautuvan ajon aikana. i2V-järjestelmän pohjana on Nissanin Omni-Sensing-teknologia, jonne kerätään keskitetysti reaaliaikaista tietoa liikenneolosuhteista, ajoneuvon ympäristöstä ja auton sisätiloista. Sateella ajettaessa auton sisälle voidaan silti tuoda näkymä aurinkoisesta maisemasta.
Kehitetty ratkaisu analysoi tien olosuhteita keräten siitä olennaista, reaaliaikaista dataa ja puoliautomaattinen kuljettajaa avustava järjestelmä, tarjoaa puolestaan tietoja auton ympäristöstä. Järjestelmä kartoittaa auton ympäriltä 360-asteisen virtuaalisen tilan ja tarjoaa tietoja esimerkiksi tiestä ja risteyksestä, näkyvyydestä, kylteistä ja lähistöllä kulkevista jalankulkijoista.
Järjestelmä käyttää myös sisätila-antureita ajoneuvossa olev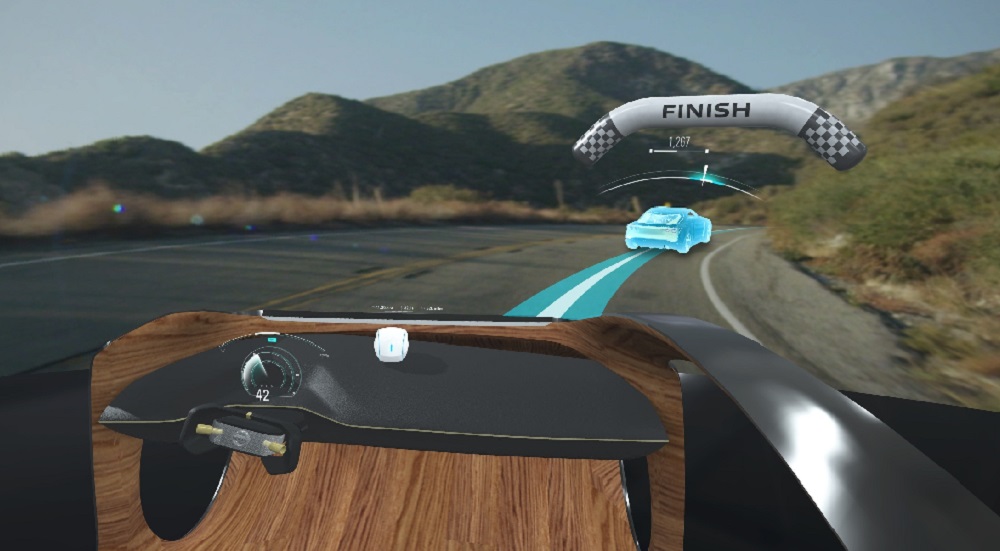 ien henkilöiden vireystilan tarkkailuun, muistuttaen kuljettajaa esimerkiksi kahvitauosta tai erityisestä tarkkaavaisuudesta.
ien henkilöiden vireystilan tarkkailuun, muistuttaen kuljettajaa esimerkiksi kahvitauosta tai erityisestä tarkkaavaisuudesta.
Kuljettajan ohjaaman ajon aikana i2V tarjoaa Omni-Sensing-järjestelmän tietoja läpinäkyvänä näkymänä kuljettajan näkökentässä. Tarjotun tiedon avulla kuljettaja voi valmistautua erilaisiin olosuhteisiin kuten huonoon näkyvyyteen, muuttuviin tieolosuhteisiin tai lähestyvään liikenteeseen. ’
Nissanin i2V voi myös luoda yhteyden kuljettajan, matkustajien ja Metaverse-virtuaalimaailmassa olevien ihmisten välille. Näin perheenjäsenet, ystävät ja muut henkilöt näyttävät olevan auton sisällä kolmiulotteisina virtuaalihahmoina, tarjoten seuraa tai apua.
Kuljettaja voi myös varata Metaversestä käyttöönsä ammattilaiskuljettajan, joka ohjaa kuljettajaa henkilökohtaisesti ja reaaliaikaisesti. Ammattilaiskuljettaja näkyy auton sisällä olevana virtuaalihahmona tai virtuaalisena johtoautona kuljettajan näkökentässä, näyttäen parhaan tavan ajaa.
Kohteeseen saavuttaessa i2V voi ottaa käyttöön SAM-järjestelmän, minkä avulla se kartoittaa vapaita parkkiruutuja ja jopa pysäköi ajoneuvon kuljettajan puolesta kiperissä paikoissa. Oppaan tarjoamia tietoja voidaan kerätä Omni-Sensing-järjestelmän avulla ja tallettaa pilvipalveluun, jolloin muut samalla alueella vierailevat henkilöt voivat hyödyntää samaa opastusta. Auton tekoäly voi myös hyödyntää samoja tietoja löytääkseen tehokkaamman ajoreitin.
Lisää: Kulutuselekttroniikan CES 2019 –näyttely 8.-11.1.2019 Las Vegasissa (LINKKI)
Tärkeimmät teknologiauutiset kätevästi myös uutiskirjeenä! Tilaa (LINKKI)
LUE – UUTTA – LUE – UUTTA – LUE – UUTTA
Uusi ammattilehti huipputekniikan kehittäjille – Lue ilmaiseksi verkosta!
https://issuu.com/uusiteknologia.fi/docs/2_2018