

Suomessa esihistoriaa tehdään koululaisille ja kansalaisille tutuksi uusimman 3D-teknologian avulla. 3D-digimallit julkaistaan liaäksi Finna-palvelussa. Ne ovat koululaisten lisäksi kaikkien vapaasti hyödynnettävissä.
Tag: 3D
Novatron tuo 3D-tekniikkaa työkoneiden koneohjaukseen

Ruotsalaisomistukseen siirtynyt työkoneiden koneohjausjärjestelmiin erikoistunut Novatron on ottanut viime aikoina uusia askeleita teollisuuden 4.0 -periaatteiden edistämisessä sekä digiviestinnästä työkoneen ja sen lisälaitteiden välillä. Lisäksi yhtiötä omistanut MOBA Mobile Automation AG myi joulukuussa osuutensa Novatron ruotsalaiselle sijoitusyhtiö Mandatum Asset Managementille.
Ilmalaivat keräävät Helsingille paikkatietoa

Suomalainen älykoripallo NBA-kehitysohjelmaan
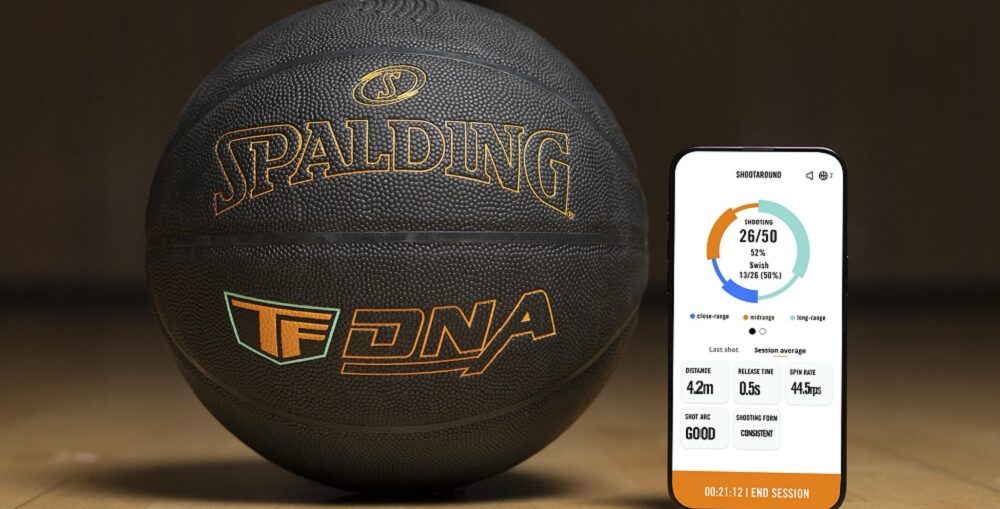
Antureilla varustettua älykoripalloyhtiö SportIQ on valittu amerikkalaisen NBA:n teknologioiden kiihdyttämöohjelmaan, jonka myötä SportIQ pääsee kehittämään teknologiaansa NBA:n virallisissa otteluissa. Teknologian avulla voidaan esimerkiksi auttaa tuomareita tuomitsemaan vaikeita tilanteita, joita kamera tai ihmissilmä pysty näkemään.
Ouluun immersiivinen sound dome -järjestelmä

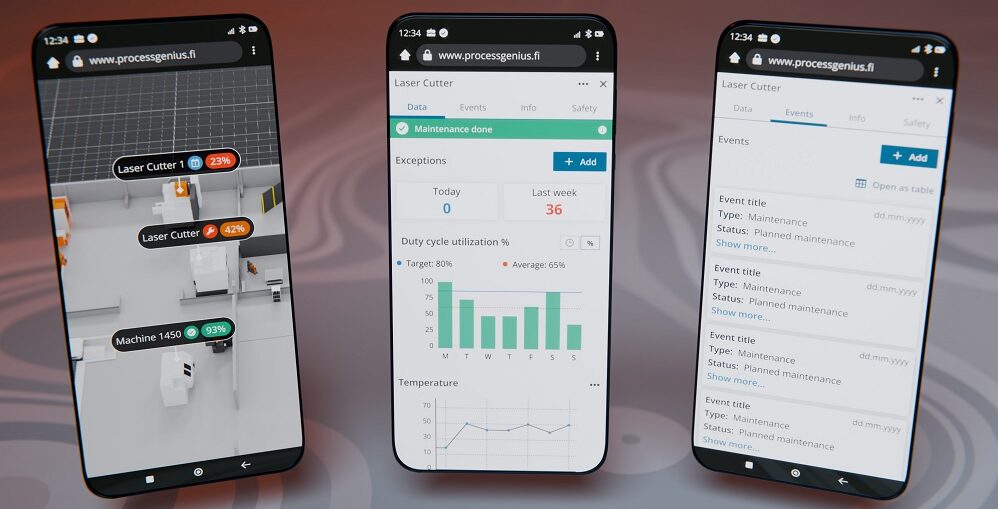
Räätälöitävä 3D-alusta teollisuuden digikaksosiin
Uudenlainen biomuste lääketieteen 3D-tulostukseen
Turun yliopiston ja Åbo Akademin tutkijat ovat kehittäneet biotulostusmusteen, jonka avulla on mahdollista 3D-tulostuksella valmistaa luonnollisen kaltaisia luun kudosmalleja. Tutkijat voivat hyödyntää uutta biotulostustekniikkaa esimerkiksi lääkekehityksessä, tulehdussairauksien luustovaikutuksien mittaamisessa sekä perinnöllisten luustosairauksien tutkimuksessa.
PÄIVITETTY: Teknologia23-messujen seminaarivideot katsottavissa verkosta

Teknologia 23 -tapahtuma esittelee Helsingin messukeskuksessa 7.-9. marraskuuta teollisuuden digiratkaisuja aina automaatioon ja elektroniikan komponentteihin ja mittauslaitteisiin. Näytteilleasettajia on lähes 400. PÄIVITYS 10.11.2023: Kävijöitä oli kolmessa päivässä 12 216. Nyt myös seminaarien videotallenteet ovat katsottavissa verkon kautta.
Fossiilivapaa teräs kiinnostaa levyinä ja jauheena

Helsingin teknologiatapahtuma laajenee – ohjelma päivitetty

Suomeen odotetaan tulevien vuosien aikana mittavia vetyteollisuuden investointeja, joten elektroniikasta ja automaatiosta kaikkiin tekniikoihin laajentunut Teknologia-tapahtuma ottaa vetyalueen yhdeksi tapahtuman uudeksi avainalueekseen. Muita ovat puhdas siirtymä, toimitusverkostot ja tekoäly. Samaan aikaan messukeskuksessa järjestetään myös Cyber Security Nordic -tapahtuma. Päivitetty 23.10.2023.